ARIS Web Guiding Systems has been rebranded as Roll-2-Roll® Web Guiding Systems
How are web guides performance specified?
Web guide manufacturers typically provide the specification of web guiding systems without much data about performance quantification. Specifications such as maximum web correction, sensor resolution, and maximum correction speed of a web guide are provided instead of performance data such as web position sensor accuracy, web guiding accuracy, closed loop response speed and other performance metrics. Inaccuracies in the sensing principles in existing web edge sensors and control systems is one of the main reasons why web guide manufacturers avoid providing these performance values. This means conventional web edge sensors and control systems are not accurate.
Another reason is the web guides' performance is also subjective and depends on process conditions such as web speed, web tension, web stiffness, traction, etc. Most often the only subjective condition that can adversely affect the web guiding performance is the traction between the web and the roller.
How to truly quantify or specify web guiding performance?
In this article, we provide a detailed performance quantification of the ARIS Web Guiding Systems with experimental results to back our numbers. The ARIS Web Guiding Systems performance was quantified in a previous article, to show the web guide’s ability to attenuate sinusoidal and step disturbances. Some additional improvements with a high-performance actuator were also published in another article. This article focuses on the dynamic response characteristics of the ARIS Web Guiding Systems using step response experiments which provide a clear insight into the closed-loop performance characteristics of the web guides. Detailed specifications of the web guiding system used in the experiment are shown in Table 1.
| Specification | Dimension/Value | Units |
|---|---|---|
| Roller Width | 254 | mm |
| Maximum Correction | 45.25 | mm |
| Displacement Resolution | 0.000248 | mm |
| Maximum Linear Speed | 172.35 | mm/sec |
| Maximum Linear Force | 133 | N |
| Sensor Resolution | 0.0635 | mm |
| Sensing Window | 16 | mm |
| Sensing Frequency | 100 | Hz |
| Control Frequency | 100 | Hz |
Web Guide's Dynamic Performance
To provide a better insight into the performance of the ARIS web guides, step response characteristics are shown in this article. Both open loop and closed-loop experiments are carried out to show the dynamic response characteristics of the web guiding systems. Dynamics or transient response to a 10.8 mm guiding point change or step reference change is used to highlight the closed-loop web guiding performance.
The step response of a system provides useful information about the transient response such as rise time, overshoot, settling time, steady-state error and maximum correction rate. Theoretically, a step response excites all frequencies and can be a predictor of other system performances such as disturbance rejection and closed-loop system bandwidth. The open loop step response experiments are also shown to provide an insight into the inherent lateral web dynamics.
Experimental Roll-to-Roll Platform
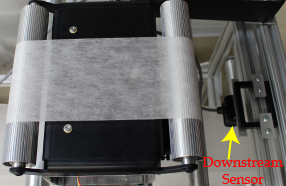
In order to quantify the web guiding performance, we conduct tests on an in-house roll-to-roll experimental platform (see Figure 1).

The length of web material threaded in the machine is about 20 meters and the web can be transported at a speed of up to 10 meters/sec. The web tension in the machine is maintained using a pneumatic dancer system. Webs with 100 mm and up to 450 mm in width can be transported in the machine which is equipped with two web guides. Two spans with a total length of 1200 mm separate the two web guides. For experimental purposes, the upstream guide is used to maintain the position of the incoming web while the downstream guide is used for both open loop and closed-loop step response tests. One additional sensor, with a sensing window of 16 mm, is used to measure the lateral position of the downstream web guide (see Figure 2). This measurement is used to understand and visualize the lateral web dynamics of a free span downstream of the web guide.
Web Guide's Dynamic Performance: Open Loop Step Response
The open loop step response shows how the web position changes with respect to the web guide displacement. In this experiment the web guide was displaced 8 mm (step displacement) at the maximum speed of 172 mm/sec. Figure 3 and Figure 4 show the position of the web guide displacement (solid red line) and the corresponding web position displacement (dotted blue line) for the two speeds.
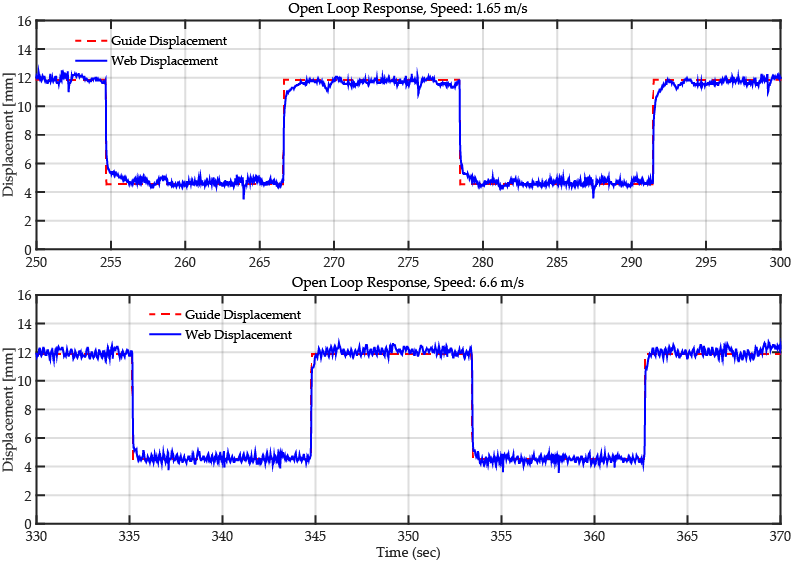
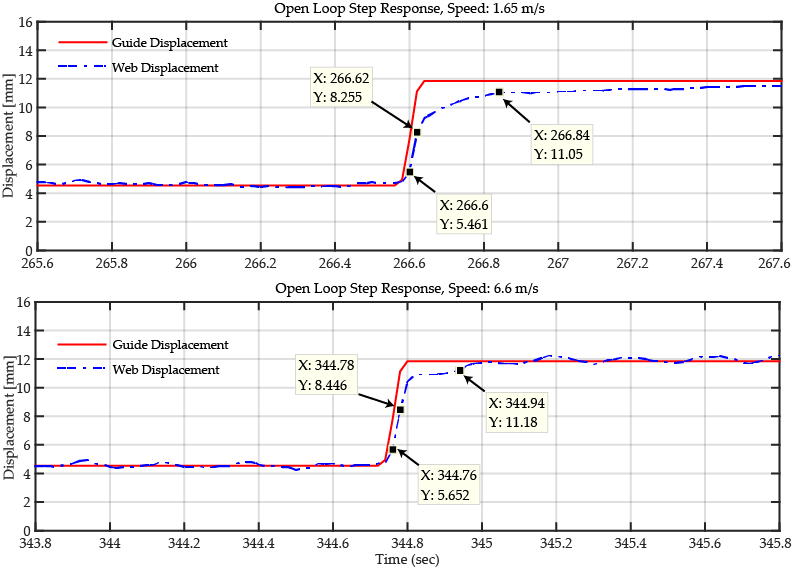
It is evident that the lateral web dynamics with a displacement guide (ARIS Web Guiding System uses a displacement or an offset-pivot guiding mechanism) is a first order response with dc-gain equal to one. It is also evident (see Figure 4) that the web response speed is directly proportional to the web transport speed. In particular as the transport speed of the web increases the lateral dynamic response of the web accelerates. At 1.65 m/s it takes about 2 s to reach the steady state value while at 6.6 m/s it only takes about 0.4 s.
The maximum web speed was measured to be 139.7 mm/sec for both web transport speeds. However, the average lateral web speed during the transient slowed considerably with the decrease in web transport speed. This clearly shows that the open loop system bandwidth (the location of the poles) depends on the speed of transport. The results of the experiments are directly in line with the model predictions provided in our previous article on lateral web dynamics.
The change in dynamic response or the change in bandwidth of the underlying system may pose difficulties to static or fixed gain feedback controllers. Typically the feedback controllers increase or decrease the bandwidth of the system (move the poles away or closer to the imaginary axis) by increasing or decreasing the overall gain of the system. Since the bandwidth is low for slow web transport speeds it is necessary to increase the controller gains to attain higher closed-loop bandwidth or response.
If the feedback controller is tuned for the slow transport speed (higher controller gains), it will overreact if the transport speed increases (the overall gain of the system becomes too high). On the other hand, when the feedback controller is tuned for fast transport speed (lower controller gains), it will under perform if the transport speed decreases (the overall gain of the system becomes too low). Hence in order to obtain the optimal performance, it is necessary to re-tune the system every time speed changes are experienced. Or a feedback controller that can automatically adapt to the speed changes is necessary. The ARIS web guiding system overcomes this problem with its sophisticated control system and keeps a consistent response over varying transport speeds.
Web Guide's Dynamic Response: Closed-loop Step Response
The step response is defined as the response of a dynamic system to an instantaneous change in reference input. To highlight the capabilities of the ARIS web guides, we chose a step change of approximately 2/3 the width of the sensing window of the sensor (10.795 mm). Figure 5 and Figure 6 show the closed-loop step response characteristics of the ARIS web guiding system for 1.65 m/s and 6.6 m/s.
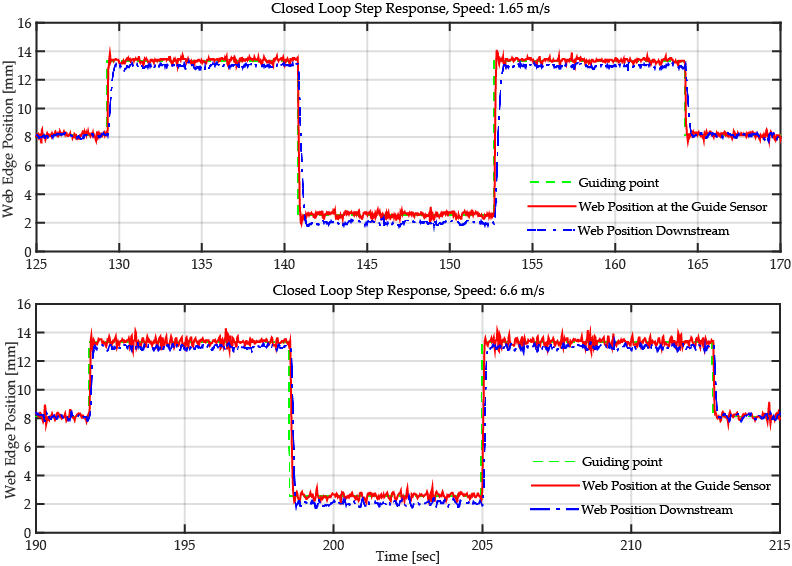
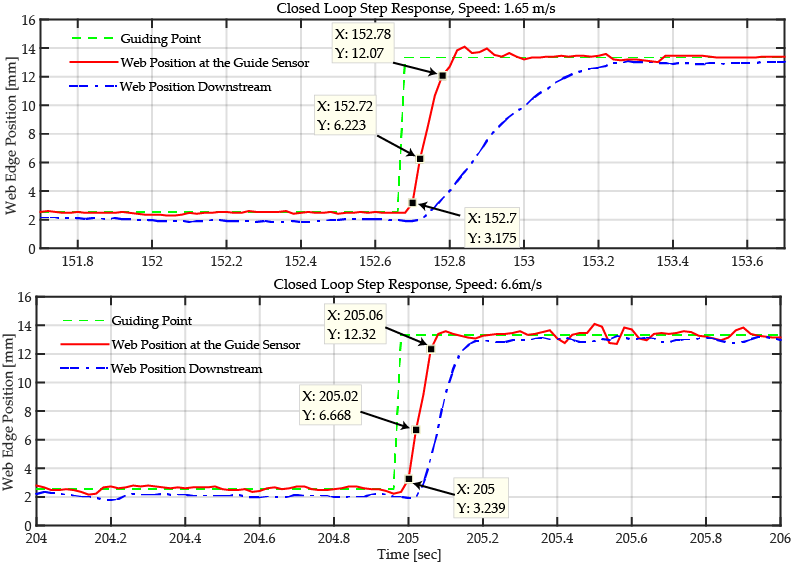
The plots show the reference input (dotted green line), the closed-loop response of the web guiding system (shown by solid red line), and the lateral position of the web downstream of the exit span of the web guide (dotted blue line). As seen from the plots, the open loop response of the system is significantly improved with the feedback control used in ARIS web guiding system. The maximum web correction speed increased from 139.7 mm/s (in open loop) to 152.4 mm/s and 171.45 mm/s for the two web transport speeds. The rise time of the system (the time taken to go from 10% to 90% of the reference) also decreased significantly from 240 milliseconds (open loop) to 80 milliseconds for 1.65 m/s web transport speed, and from 180 milliseconds (open loop) to 60 milliseconds for 6.6 m/s web transport speed. An overall 67.67% improvement in speed is achieved with the closed-loop system.
Note, the step response remains substantially unchanged demonstrating the ability of ARIS web guiding system to overcome the challenges due to the changing underlying dynamic system. Another key characteristic of the system response seen in the plots is the overshoot characteristics. Even when the web is displaced with the maximum correction rate, the overshoot in the system is not significant. A clean first-order like the response is observed for the closed-loop response with a settling time of fewer than 100 milliseconds which is more than sufficient for most converting applications. The step response also provides an insight into the bandwidth of the closed-loop system. Using the general relationship between bandwidth (BW) and rise time,
we see that the bandwidth is about 4.375 Hz for 1.65 m/s and 5.83 Hz for 6.6 m/s. Note that the theoretical bandwidth of the guide mechanism is 6.98 Hz and the lateral web dynamics, which is influenced by the web transport speed, decreases the bandwidth of the system. Essentially the web acts as a low pass filter and absorbs the high frequencies and reduces the overall speed of the closed-loop system. To clearly see the filtering effect of the web, the web edge position downstream of the guide exit span is measured and shown in the plots in Figure 5. From the plots, it is evident that as the speed decreases the rise time or the bandwidth of the lateral web dynamics is lowered. Even though the closed-loop response of the system at the guide exit span is fast, the lateral web dynamics further filters or slows the response in the downstream span. Hence it has to be noted that the web transport speed is going to limit the achievable response speed in the spans downstream of the web guide. No matter the speed of correction in the web guide exit span, the correction needs to go through the dynamics of the web in the subsequent spans which will slow down the response speed based on the web transport speed.
Summary and Conclusions
Open loop and closed-loop step response of a dynamic system clearly demonstrate the dynamics response capabilities of the system. In this article, both open loop and closed-loop step response characteristics of the ARIS web guiding system were highlighted. The experimental data clearly showed the excellent performance characteristics of the web guide in terms of rise time, overshoot and settling time. Moreover, the data also showed how ARIS Web Guiding System is able to adapt to changing process condition (web transport speed) and maintaining the same level of performance. It has to be noted that the controller gains were never changed or tuned for any of the experiments.
The article also highlighted the effect of web speed on the lateral dynamics and how it affects the overall achievable performance for the web guiding system. Essentially the web acts as a low pass filter with the bandwidth of the filter being directly proportional to the speed of web transport. As the speed decreases the response of the closed-loop system also slows down. Even though the web guide is capable of improving the response in the web guide exit span, the effect will not be seen downstream unless the web transport speed is sufficiently high.



